|
|
Post by DJLinux on Nov 11, 2008 20:28:04 GMT -5
Very nice djinux, How do you get the subs to share information in the SDK? Do you mean how callbacks from any plugin works? Joshy |
|
|
|
Post by Darkjester on Nov 11, 2008 21:20:46 GMT -5
Im guessing, im trying to make a particle engine api plugin, i have the framework, but im trying to add paramters kinda like the gl_param sorta thing as well as having my subroutines shareing data to compute positions and then make calls to show them to screen.
|
|
|
|
Post by DJLinux on Nov 15, 2008 18:12:16 GMT -5
i got many types of callback's working
let me know if any will take a look to the plugin C++ source code
Joshy
(by the way i found out that when you use VisualStudio or Codeblocks with MinGW a empty B4GL plugin will be 40~KB but now i use Netbeams IDE with CygWin and the same plugin are only 20~KB)
|
|
|
|
Post by DJLinux on Nov 15, 2008 18:26:48 GMT -5
use the link from first post
(C++ Source Code and a NewtonPlugin.dll is included)
Joshy
|
|
|
|
Post by Darkjester on Nov 15, 2008 18:28:41 GMT -5
thnx im sure it will be helpful  edit: I just did a fps test between this physics engine compared to the other one you ported, This one is about 20 fps FASter!!!!! |
|
|
|
Post by Nicky Peter Hollyoake on Nov 17, 2008 20:19:19 GMT -5
This is good. ;D I probaly won't use many plugins because I believe in learning the background of something before using it. Using plugins would make me feel dumb.  - Nicky |
|
|
|
Post by Adam on Dec 11, 2008 21:12:24 GMT -5
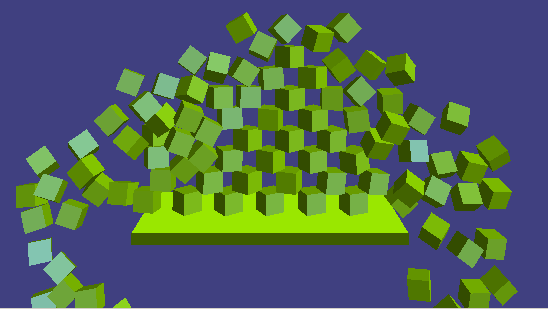
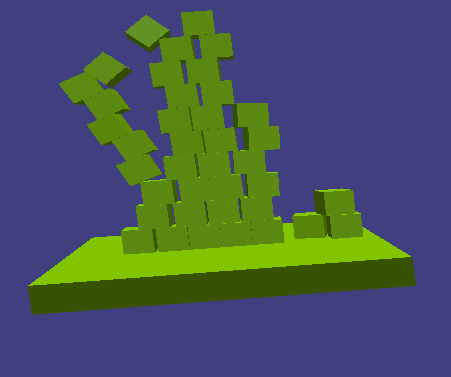
here.. i got bored and was messing around with the test2 and thins is what i got.. enjoy..' prototypes
declare sub InitGL(x#,y#,z#)
declare sub DrawBox(x#,y#,z#,m#()())
' globals
const MAX_BOXES=101
dim Boxes(MAX_BOXES-1)
dim M#(3,3)
' callbacks
sub AutoactiveCallback()
dim Body=NewtonGetCallbackBody()
dim State=NewtonGetCallbackState()
' do what ever
end sub
sub TransformCallback()
dim Body=NewtonGetCallbackBody()
dim TM#(3)(3)=NewtonGetCallbackMatrix()
' do what ever
end sub
' called for all bodys from NewtonUpdate()
sub ForceAndTorqueCallBack()
dim Body=NewtonGetCallbackBody()
NewtonBodySetForce(body,vec3(0,NewtonBodyGetMass(body)*-9.81,0))
end sub
' called if a body dies
sub DestructorCallBack()
' mark it as unused
Boxes(NewtonBodyGetUserData(NewtonGetCallbackBody()))=-1
end sub
' called for any body outside the WorldSpace
sub LeaveWorldEvent()
dim Body = NewtonGetCallbackBody()
' let it die (newton will call the DestructorCallback)
NewtonDestroyBody(NewtonBodyGetWorld(Body),Body)
end sub
' setup OpenGL mode and observer
InitGL(0,5,25)
' create a newton world
dim World=NewtonCreate()
' [optional] define a smal world space
NewtonSetWorldSize(World,vec3(-500,-1,-100),vec3(500,500,100))
' set an Event (for all bodys outside our world space)
NewtonSetBodyLeaveWorldEvent(World,"LeaveWorldEvent()")
' create a none moveable ground box
dim cGround = NewtonCreateBox(World,10,1,10)
dim bGround = NewtonCreateBody(World,cGround)
' release the collision box object
'(decrement OOP object referenc)
NewtonReleaseCollision(World, cGround)
' create a collision 1x1x1 unit box
dim cBox=NewtonCreateBox(World,1,1,1)
dim x#,y#,i
for i=0 to MAX_BOXES-1
' create rigid body
Boxes(i)=NewtonCreateBody(World,cBox)
' disable auto freezing
NewtonBodySetAutoFreeze(Boxes(i),0)
' save array index as user data
NewtonBodySetUserData(Boxes(i),i)
' set mass
NewtonBodySetMass(Boxes(i),1)
' set callback's
NewtonBodySetAutoactiveCallback(Boxes(i),"AutoactiveCallback()")
NewtonBodySetTransformCallback(Boxes(i),"TransformCallBack()")
NewtonBodySetForceAndTorqueCallBack(Boxes(i),"ForceAndTorqueCallBack()")
NewtonBodySetDestructorCallBack(Boxes(i),"DestructorCallBack()")
' set position
NewtonBodyGetMatrix(Boxes(i),m#)
' x,y,z position
y#=int(i / 10)
x#=int(i - (y#*10))
x#=(x#-2.5)*1.
if int(y#) and 1 then x#=x#+0.75:end if
y#=1.001+y#*1.001
m#(3,0)= x#-2
m#(3,1)= y#
'm#(3,2)= z#
NewtonBodySetMatrix(Boxes(i),m#)
next
' release the collision box object
'(decrement OOP object referenc)
NewtonReleaseCollision(World,cBox)
'
' main loop
'
dim zrot#, Angle#(1)
while TRUE
' one step in our simulation (60 FPS)
NewtonUpdate(World,1.0/60.0)
glClear(GL_DEPTH_BUFFER_BIT or GL_COLOR_BUFFER_BIT)
GLRotateF(Angle#(0),0,1,0)
GLRotateF(Angle#(1),0,0,1)
' draw the ground box
DrawBox(10,1,10,NewtonBodyGetMatrix2(bGround) )
' draw the moveable rigid boxes
for i=0 to MAX_BOXES-1
' draw only active bodys
if Boxes(i)<>-1 then
DrawBox(1,1,1,NewtonBodyGetMatrix2(Boxes(i)) )
end if
next
NewtonBodyGetMatrix(bGround,m#)
m#(0,1)=Angle#(1)
M#(0,2)=Angle#(0)
NewtonBodySetMatrix(bGround,m#)
IF Mouse_Button(Mouse_LButton) Then
'For I = 0 To Max_Boxes-1 Step 10
I = 100
IF Boxes(I) <> -1 Then
m#(3,0)= (Mouse_X()-.5)*10
m#(3,1)= (1-Mouse_Y())*10
m#(3,2)= 10
NewtonBodySetMass(Boxes(i),10)
NewtonBodySetMatrix(Boxes(i),m#)
NewtonBodySetVelocityxyz(Boxes(I),0,0,500)
Endif
'Next
Endif
IF ScanKeyDown(VK_Left) Then Angle#(0) = Angle#(0) - .01 Endif
IF ScanKeyDown(VK_Right)Then Angle#(0) = Angle#(0) + .01 Endif
IF ScanKeyDown(Asc("A")) Then Angle#(1) = Angle#(1) - .01 Endif
IF ScanKeyDown(Asc("D")) Then Angle#(1) = Angle#(1) + .01 Endif
SwapBuffers()
WaitTimer(1000/60)
wend
' free all newton resources
NewtonDestroy(World)
sub InitGL(x#,y#,z#)
glViewport(0, 0, WindowWidth(),WindowHeight())
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
gluPerspective(45.0, WindowWidth()/WindowHeight(), 1, 1000)
glMatrixMode(GL_MODELVIEW)
glClearColor(0.25, 0.25, 0.5, 1)
glShadeModel(GL_SMOOTH)
glLightfv(GL_LIGHT0, GL_POSITION,vec4(0,10,5, 0))
glLightfv(GL_LIGHT0, GL_AMBIENT ,vec4(0.2,0.2,0.2, 0))
glLightfv(GL_LIGHT0, GL_DIFFUSE ,vec4(0.7,0.7,0.7, 0))
glLightfv(GL_LIGHT0, GL_SPECULAR,vec4(0.7,0.7,0.7, 0))
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glEnable(GL_CULL_FACE)
glFrontFace(GL_CCW)
glMaterialfv(GL_FRONT, GL_SPECULAR , vec4(0,0,1, 1))
glMaterialfv(GL_FRONT, GL_AMBIENT_AND_DIFFUSE, vec4(0.5,0.75,0, 1))
glMaterialf (GL_FRONT, GL_SHININESS , 15.0)
glTranslatef(-x#,-y#,-z#)
end sub
sub DrawBox(x#,y#,z#,m#()())
glPushMatrix()
glMultMatrixf(m#)
glScalef(x#,y#,z#)
glBegin(GL_QUADS)
' front
glNormal3f(0.0, 0.0, 1.0)
glVertex3f(-0.5, -0.5, 0.5)
glVertex3f( 0.5, -0.5, 0.5)
glVertex3f( 0.5, 0.5, 0.5)
glVertex3f(-0.5, 0.5, 0.5)
' back
glNormal3f(0.0, 0.0, -1.0)
glVertex3f( 0.5, -0.5, -0.5)
glVertex3f(-0.5, -0.5, -0.5)
glVertex3f(-0.5, 0.5, -0.5)
glVertex3f( 0.5, 0.5, -0.5)
' top
glNormal3f(0.0, 1.0, 0.0)
glVertex3f(-0.5, 0.5, 0.5)
glVertex3f( 0.5, 0.5, 0.5)
glVertex3f( 0.5, 0.5, -0.5)
glVertex3f(-0.5, 0.5, -0.5)
' bottom
glNormal3f(0.0, -1.0, 0.0)
glVertex3f(-0.5, -0.5, -0.5)
glVertex3f( 0.5, -0.5, -0.5)
glVertex3f( 0.5, -0.5, 0.5)
glVertex3f(-0.5, -0.5, 0.5)
' left
glNormal3f(-1.0, 0.0, 0.0)
glVertex3f(-0.5, -0.5, -0.5)
glVertex3f(-0.5, -0.5, 0.5)
glVertex3f(-0.5, 0.5, 0.5)
glVertex3f(-0.5, 0.5, -0.5)
' right
glNormal3f(1.0, 0.0, 0.0)
glVertex3f(0.5, -0.5, 0.5)
glVertex3f(0.5, -0.5, -0.5)
glVertex3f(0.5, 0.5, -0.5)
glVertex3f(0.5, 0.5, 0.5)
glEnd()
glPopMatrix()
end sub
i did this in about 10 minutes.. i was bored lol.. so there is no special declarations or anything.. happy shooting =].. i am soo happy i actually understand this physics plugin(for the most part)
|
|
|
|
Post by DJLinux on Jan 8, 2009 18:57:20 GMT -5
Hey Djlinux can you upload the missing headers for this plugin? what for missing headers? Joshy |
|